Boats and Equipment
SURVEY BOAT
Marathon is a Striker 44 aluminium hull Sports fisher/cruiser built in the Netherlands in 1972. Completely refitted in 2013, she is the ideal platform for marine surveying work in our coastal waters.
Home Port: St Helier, Jersey
Particulars: Length: 14.5m – Beam 4.2m – Draught: 1.2m – Speed: 4.5 to 23 knots
Power: 2 x Volvo Penta M600 Marine diesel engines
Panda 7.5 kw Generator
Seakeeper 5 Gyro-stabiliser
Trimble BX992 GNSS Receiver and antenna for precise positioning and navigation.
Norbit WBMS Tx Multibeam sonar for ultra-high resolution with integrated sound-velocity sensor for precision mapping of the sea-bed.
SMC IMU 108 Motion Reference Unit for Roll, Pitch and Heave.
BeamworX Autoclean Navigation and acquisition software
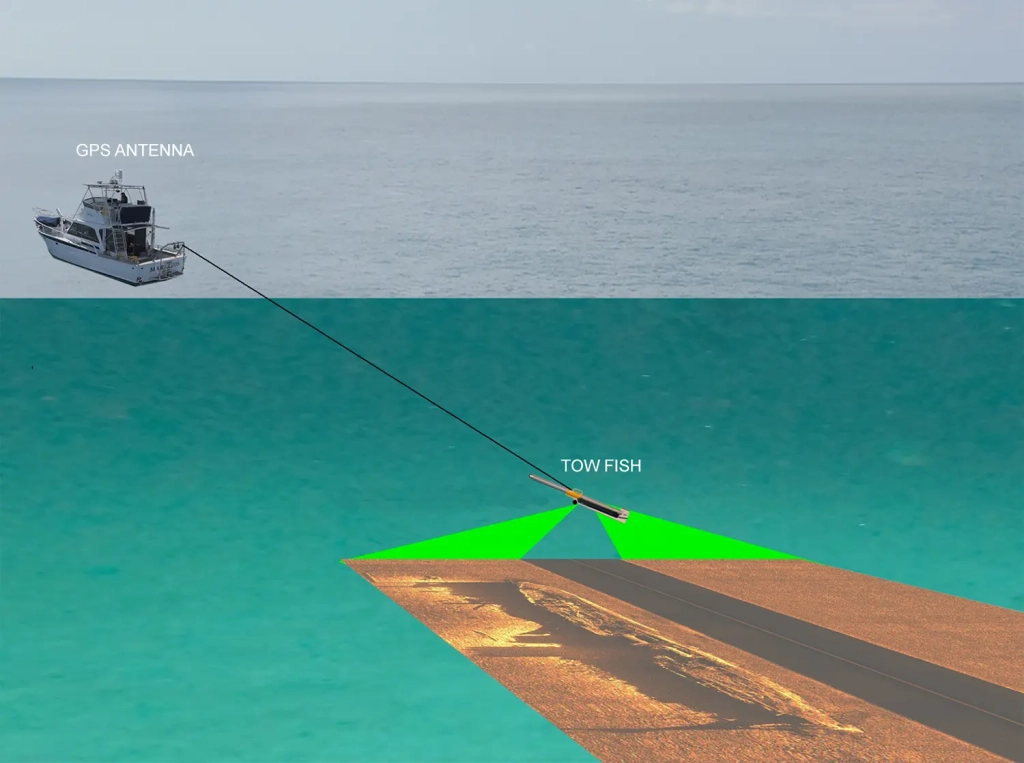
C-Max 2 Side Scan Sonar and deck winch and A-Frame
SeaSpy2 Marine Magnetics Magnetometer and 250m cable










{kind=link}
{kind=link}
{kind=link}